自幹作業系統 - Context Switch
自幹作業系統 - Simple OS 學習筆記來到第五篇,上一篇整理了 Task 的定義、排程器概念、以及排程演算法,順著這樣的思路,往下深挖一個很重要的概念:Context Switch,中文翻譯成 上下文切換、內容轉換、環境切換,我自己習慣翻譯 上下文切換 。對應到 課程大綱 大約在 day31 ~ 36 的範圍。
本文將整理以下內容:
- 什麼是 Context Switch?它帶來的成本 負擔 (Overhead) 是什麼?
- Scheduler 怎麼決定 Switch 的?
- SimpleOS 是怎麼實作 Context Switch 的?
除了在作業系統裡,Context Switch 也可以用在人身上,代表人處於同時在很多任務之間切換,因而無法專注的現象,背後隱含著成本很高的意思。我很久以前寫的 Cost in Context Switch 就是在描述工作頻繁被干擾,造成無法專注,這種極端現象帶來的影響,以及可能的解決方法。類似概念在 Peopleware:腦力密集產業的人才管理之道 以及 心流:高手都在研究的最優體驗心理學 這些書裡也有提到。
最後再來聊聊 AI 話題,這次整理 關於 Harness Engineering 的想法與相關資料,因為概念跟我在自幹作業系統實在太像了。
自幹作業系統 系列:
註:內容僅是自學的一些筆記,如果有發現資訊不正確,或者描述錯誤,請不令給予指教,感謝。
一、什麼是 Context Switch?它帶來的成本 負擔 (Overhead) 是什麼?
定義
Context Switch (上下文切換) 是作業系統實現多工 (Multitasking) 的核心機制。它的本質是:
把 CPU 從一個行程「借走」,交給另一個行程使用,並讓雙方都以為自己一直在跑。
「Context (上下文) 」指的是一個行程在某個時間點的完整執行狀態,包含:
通用暫存器:EAX、EBX、ECX、EDX、ESI、EDI、EBP程式計數器 (EIP):下一條要執行的指令在哪旗標暫存器 (EFLAGS, Extended Flags Register):運算結果與中斷開關狀態堆疊指標 (ESP, Extended Stack Pointer):目前的呼叫堆疊深度記憶體空間 (CR3, Control Register 3):存放 Page Directory 實體位址。虛擬位址對應到哪塊實體記憶體
這些資訊加起來,就是一個行程「靈魂」的全部。Context Switch 就是把靈魂從一個殼換到另一個殼。
通用暫存器名稱對照表參閱 Source Code 的 Terms.md 整理
觸發時機
在 Simple OS 裡,Context Switch 有兩種觸發方式:
- 搶佔式 (Preemptive) :由 PIT (可程式化間隔計時器,8254 晶片) 每 10ms 產生一次 IRQ0 中斷,強制叫醒
排程器 (Scheduler)。這讓任何一個行程 (Process) 都不能霸佔 CPU,即使它是個無限迴圈如下 timer.c,更多參閱 自幹作業系統 - 初探 Timer 原理 的詳細介紹。
1 | // timer.c — 每一個 tick (10ms) 就強制執行一次排程 |
- 主動讓出 (Voluntary) :行程呼叫 sys_wait()、sys_sleep() 等 syscall,自願放棄 CPU 使用權。
1 | int sys_sleep(uint32_t ms) { |
成本分析
Context Switch 不是免費的,它的代價主要來自三個層面:
- 暫存器存取:
pusha/popa指令需要讀寫 8 個通用暫存器,加上EFLAGS - TLB 失效: 切換
CR3 (分頁目錄)會清空TLB (Translation Lookaside Buffer),導致後續記憶體存取全部 Page Miss,要重新走一遍 Page Table - 快取污染: 新行程的
工作資料集 (Working Set)和舊行程完全不同,L1/L2 Cache 大量失效
TLB 是 Context Switch 最昂貴的部分。TLB 是 CPU 用來快取 虛擬 / 實體 位址對應的硬體,容量很小 (通常 64–1024 條) 。一旦切換到不同位址空間,整個 TLB 失效,接下來幾百條記憶體存取都得重新查 Page Table,速度驟降。
這也是為什麼現代 OS 盡量減少不必要的 Context Switch,帶表 每次切換都是一筆看不見的效能稅。
二、排程器如何決定「切換給誰」?
schedule() 是 Context Switch 的大腦,在每一個 timer tick 或行程主動讓出時被呼叫。它的工作分三步:
步驟 1:垃圾回收 + 喚醒睡眠任務
在真正排程之前,先清理戰場:
1 | void schedule() { |
步驟 2:Round-Robin 輪轉找下一個行程
所有行程串成一個環狀鏈結串列 (Circular Linked List) 。排程器從當前行程的「下一個」開始掃,找到第一個 TASK_RUNNING 的就選它:
1 | // 從當前行程的 next 開始找,公平輪轉 |
如果沒有任何行程可以跑,就切換到 idle_task (PID 9999) ,它只會執行 sti; hlt,讓 CPU 省電等待下一個中斷。
步驟 3:執行 Context Switch
找到目標行程後,更新 Task State Segment (TSS) 的 kernel stack 指標,然後把控制權交給組合語言:
1 | task_t *prev = (task_t*)current_task; |
set_kernel_stack() 的作用是更新 TSS (Task State Segment) 裡的 esp0 欄位。當新行程從 Ring 3 觸發系統呼叫進入 Ring 0 時,CPU 會用這個值來設定 Kernel Stack,確保每個行程都有自己獨立的核心堆疊空間。
三、組合語言如何完成最後一步切換?
為什麼需要組合語言?
這是核心問題。理論上,C 語言可以操作大部分硬體,但有幾件事 C 語言做不到或做了會出問題:
- 直接操作 ESP (堆疊指標) :一旦 C 函式修改了
esp (堆疊指標暫存器),整個呼叫堆疊就垮了——區域變數找不到、返回位址不見了。這件事只能用組合語言在 C 的呼叫慣例之外完成。 - 直接寫入 CR3:CR3 是分頁目錄的實體位址,寫入 CR3 會立即切換虛擬位址空間並清空 TLB。這是特權指令 (只有 Ring 0 能執行) ,且必須在正確時序下操作,中間不能有任何 C 的堆疊假設。
- 精確控制暫存器:
pusha/popa一次存取 8 個暫存器,語意清晰、不帶副作用。C 語言的inline asm雖然也能操作暫存器,但要在 C 函式「外部」保存/恢復全部暫存器,只有純組合語言才能確保不汙染任何狀態。
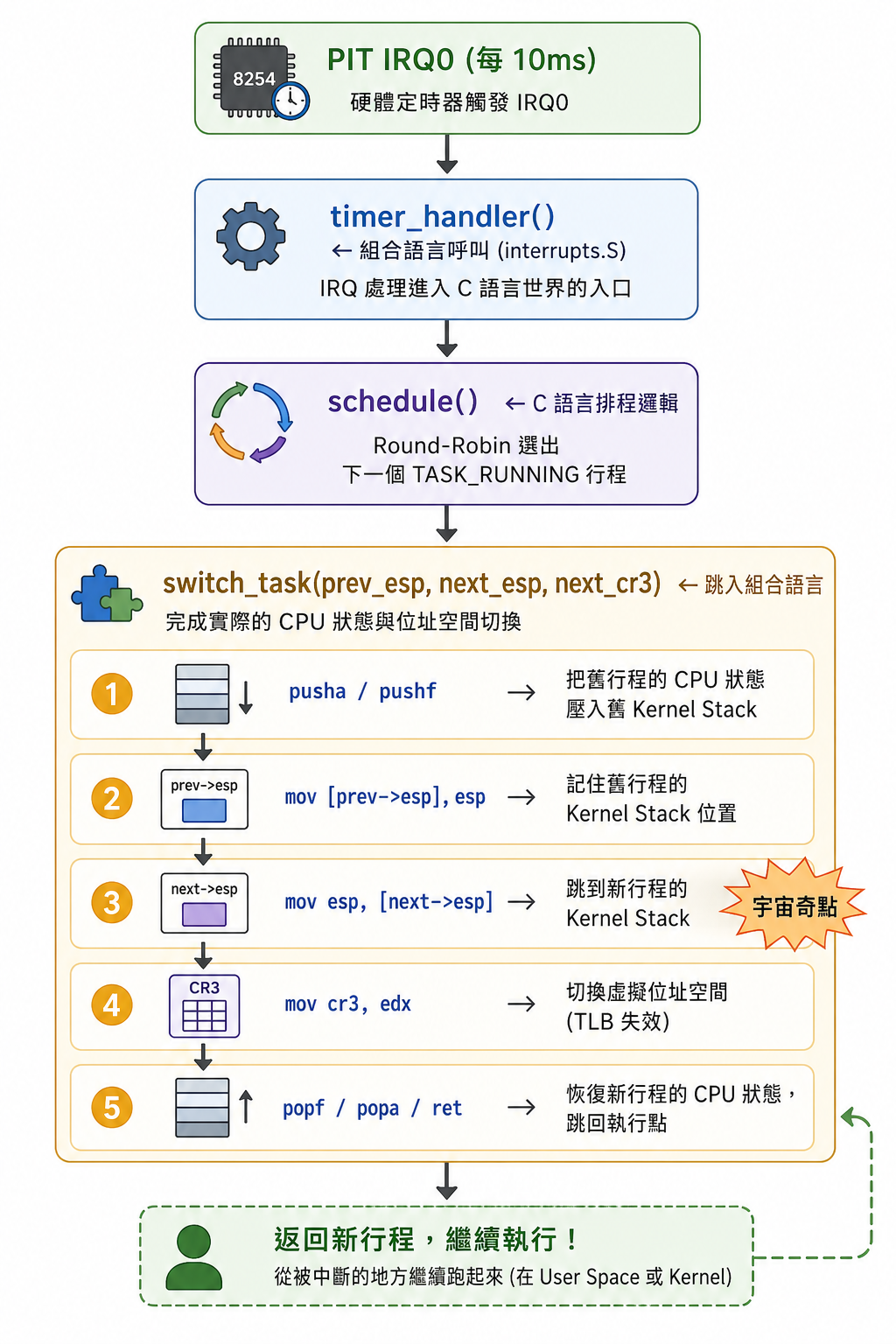
switch_task.S 逐行解析
1 | ; extern void switch_task(uint32_t *current_esp, uint32_t *next_esp, uint32_t next_cr3); |
此時舊行程的完整 CPU 狀態已全部壓在它的 Kernel Stack 上。
1 | ; 在換掉 ESP 之前,先把第三個參數 (next_cr3) 存到 EDX |
這是整個函式最微妙的地方。函式參數是放在「呼叫時的舊堆疊」上,一旦 ESP 切換到新行程的堆疊,就再也讀不到這些參數了。所以必須在切換 ESP 之前把 next_cr3 偷渡到暫存器 EDX 裡。
1 | ; 把當前 ESP 值存入 prev->esp (第一個參數是指向 prev->esp 的指標) |
mov esp, [eax] 這一行是整個切換的「宇宙奇點」。執行前是舊行程,執行後 CPU 就活在新行程的堆疊裡了。
1 | ; 現在把暫存的 next_cr3 寫入 CR3,切換虛擬位址空間 |
ret 指令從堆疊彈出返回位址 (EIP) ,而這個 EIP 是新行程上次被 switch_task 呼叫時壓入的,所以 CPU 就這樣神不知鬼不覺地回到了新行程「上次停下來的地方」,繼續執行。
新行程第一次被排程:child_ret_stub
對於一個剛被 fork() 或 create_user_task() 建立、從未執行過的行程,它的 Kernel Stack 上沒有真實的歷史返回位址,需要手動偽造。
在建立行程時,task.c#create_user_task(), fork() 會在 Kernel Stack 上手工佈置一個完整的堆疊幀:
1 | // create_user_task() / sys_fork() 中的堆疊佈置 |
當 switch_task 的 ret 彈出返回位址時,CPU 就跳進 child_ret_stub:
1 | child_ret_stub: |
iret 是降級的魔法咒語。它一次從堆疊彈出 EIP、CS、EFLAGS (以及跨特權時的 ESP 和 SS) ,讓 CPU 從 Ring 0 飛回 Ring 3 的程式碼,開始執行使用者程式。
整體流程回顧
Context Switch 最神奇的地方在於:
對每一個行程來說,它從未「感覺」自己被暫停過:它只是**「從
switch_task的呼叫點返回了」**,而這個返回,可能已經過了幾十個 tick、幾百個毫秒。
下圖是用 ChatGPT 整理的整體流程:
小結
Context Switch 是作業系統裡 C 與組合語言最精密的合作:C 語言負責「想清楚」,組合語言負責「做乾淨」。理解這個界線,就理解了為什麼作業系統必須從最底層開始寫起。
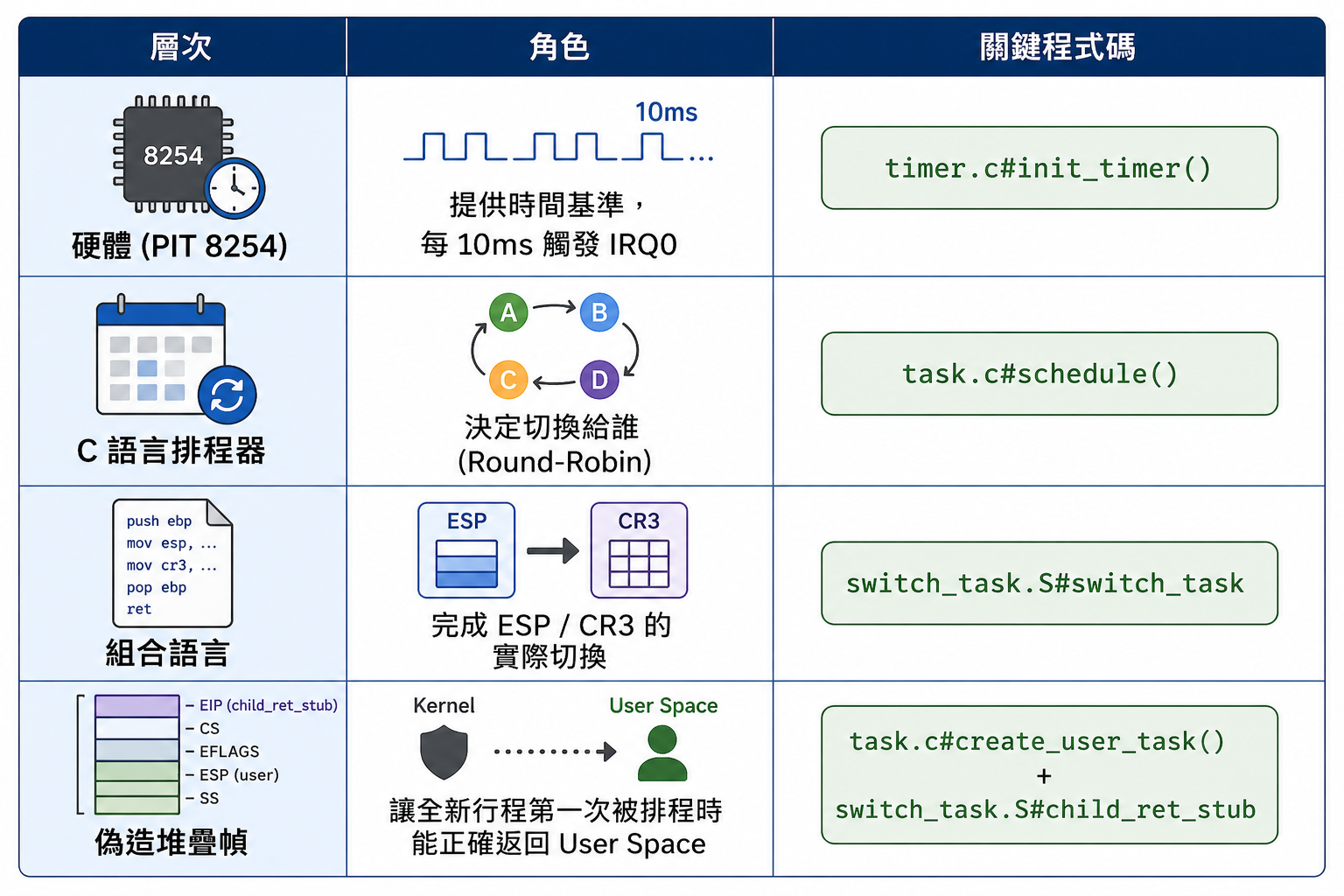
下圖用 ChatGPT 整理硬體、排程器、組合語言、偽造堆疊幀四個層次彼此之間的角色以及關鍵程式碼:
心得筆記
越到底層,整理相關資訊越是辛苦。即使已經有 AI 幫忙,但有不少概念看了好幾次還是不太懂,特別是那一堆通用暫存器,如 EIP、ESP、EFLAGS … 等。但有趣的是這些正式研究作業系統背後的主要動機,看到不懂的,或者反覆出現的,代表後面越是有故事可以說。挖下去就一堆東西出來 XD
然後整理探索筆記一開始只是想了解一下 sleep 實作,然後就越挖約多,越挖越有趣。sleep 已經實作好了,但是 sleep 其實站在很多基礎點上,這些點如果沒搞清楚,這個實作意義就不大了。反正 AI 瞬間就可以寫出一個類似的東西。
回到我自己的動機:用 AI 輔助我學習。我也在 Gemini CLI / Claude Code / Codex 這三個主流的 Agentic 來回嘗試,當遇到問題 Gemini 回答得不好、或者我看不懂,就把問題或者回答結果,丟給 ChatGPT / Claude,如此反覆,從而探索到更多有趣的知識。最後 ChatGPT 幫忙畫圖 (剛好趕上 Image2 出來),我在文字與圖反覆調整與更正,從而對整個作業系統更有感。
下一篇終於可以整理 sleep 的實作了 XDD
用 AI 學習的過程,有沒遇到幻覺問題?
自幹作業系統到現在,已經一個多月,我整個過程都是在 Gemini (Web) 上,同一個對話,以 Prompt 的方式學習。同一個對話匡的對話內容,從 Day1 ~ Day99 所有的課程內容,包含 Debug 的過程、章節總結、段落總結 … 等。那過程中有沒出現幻覺?
其實是有,但嚴格來講,對我來講,影響不大。我的方法是,過程中我會反覆把現在程式碼、課程的學習重點與目標、在我本機測試的結果與截圖,反覆貼給 Gemini,反覆強化他上下文的資料,其實也在加深我自己的記憶與理解。因為這樣反覆地貼 Source Code 給他,反覆地餵他最新的資料與現況,所以我並沒有遇到最近 (2026/02~04) 很多人在 Complain Gemini 一直出現幻覺的問題。
另外過程中,我全程都是使用 Gemini Pro 的模式,每個問題都讓他做深度的思考與應對。過程也有過不小心點到快捷的模式,就會出現亂答的現象,只要切過去,然後同樣問題讓他重答就可以了。
底下截圖是 day34_fork 課程內容的 debug 截圖,有興趣可以店點進去看看當時我怎麼跟他對話的:
閒聊 AI - Harness Engineering
最近除了自己持續研究作業系統實作相關議題,跟 AI 趨勢的概念也是沒有停下來。Harness Engineering 是最近我持續在關注的課題,相關的技術也是持續在爆炸的生出來。
知道 Harness (馬具) 這個字,是在我 Designing Test Architecture and Framework 時期,就有整合一個叫做 CLI Harness 自動化程序,他主要負責測試 網路防火牆路由器 (待測產品) 的所有 CLI 指令是否正常運作,我記得有 400+ 的 Test Cases,全部透過 ssh / telnet 方式,透過比對輸出文字的方式驗證功能是否正常。這是每個版本出貨前都要測試的,當時有 4 個 LTS branch + main version (Trunk-Based) + 40+ 多個客戶版,所以只要改動 (feature or bug fix) 有影響的範圍都要跑,而這個產品的客戶都是歐美日各大銀行。所以這產品的 Regression Test 是非常重要的。
映像很深刻的是當時團隊的工作流程,用現在的眼光來看,其實就是一種 TDD 的概念,但在當時團隊的結構,是由開發者實作功能邏輯,由 QA 團隊實作自動化測試 (BlackBox),透過 CLI Harness 方式驗收功能是否正常。當時團隊開發與測試是同步作業,所以大家其實平常工作都是一起進行的。這個經驗放到現在來看更有意思 — 現在 Agent 系統幾乎都在強調 Eval-Driven Development (EDD, 評估集驅動開發) ,本質上就是把當年我們做 BlackBox 測試的思維,直接內建到 Agent 的執行循環裡。
回到現在 AI 時代的 Harness Engineering,會跑出這樣的概念從整個歷史趨勢來看,一點都不意外。因為 Prompt Engineering、Context Engineering,都缺乏了一個可以控制 AI 能夠穩定的、持續輸出可靠品質的方法。最核心的 LLM 每個月都會有新的突破,誰又超越誰了。下圖整理過去 2023 - 2026 相關 AI 發展演進的時間點:
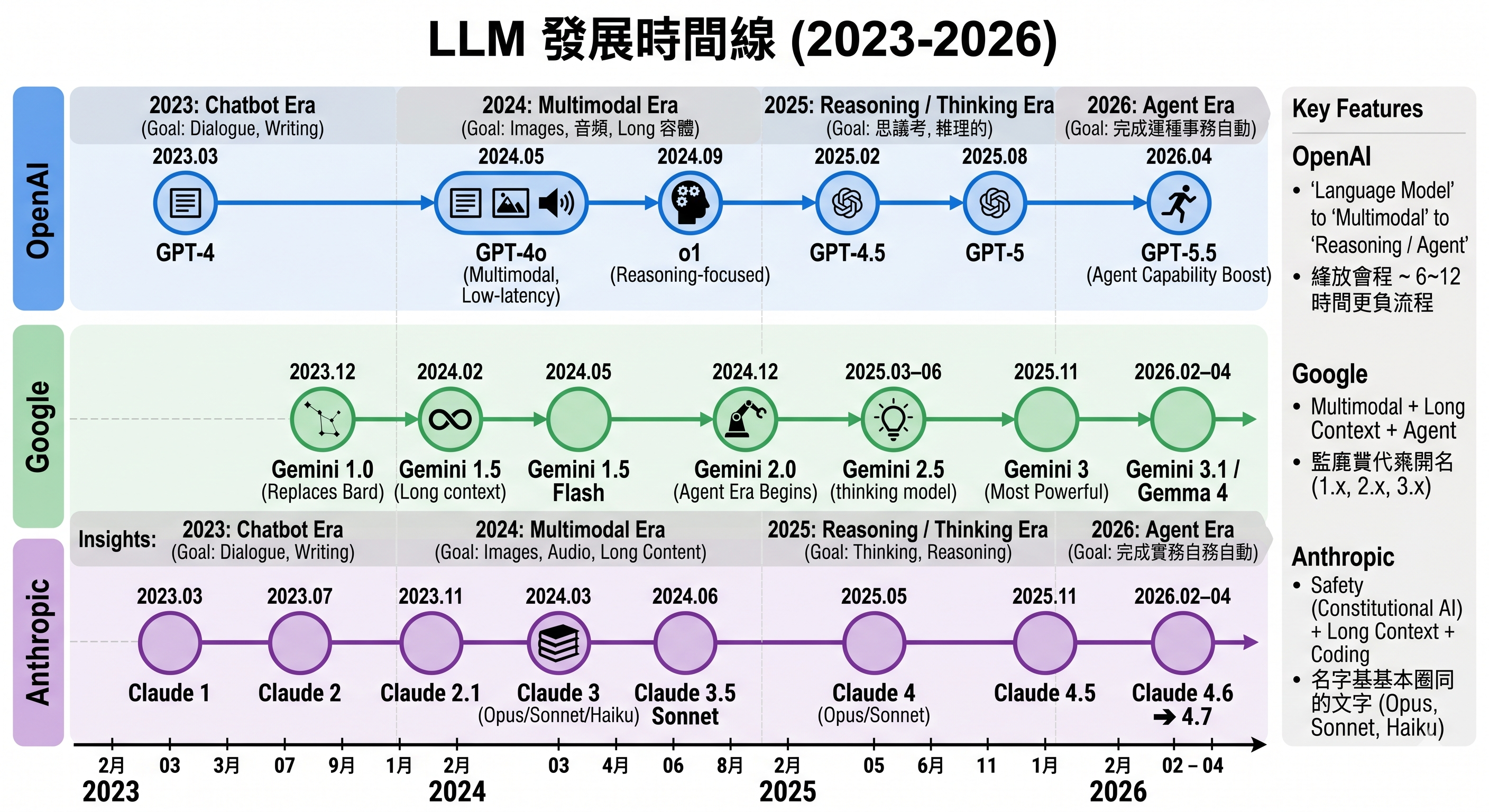
寫這篇文章的時間點是 2026/04/27,我相信很快地又會有誰超越誰,誰是 OOXX 之王的稱號 (媒體炒作)。同時,Open Source / Local LLM (Gemma4, Qwen, MiniMax, DeepSeek) 也同步在嘗試能否改變,兩邊整天打來打去。
所以,然後呢???
其實大家慢慢都發現了,單純擴大模型參數帶來的邊際效益正在遞減 — 注意,這不等於 LLM 整體能力觸頂,重點是已經轉移到別的地方:
推理時計算 (test-time compute):讓模型在回答前多想一下,像是延長思考鏈、self-consistency` 那種做法。OpenAI o1/o3 系列就是這條路線的代表。工具使用與 Agent 化:讓模型不只「回答」,而是真的「動手做」 — 呼叫 API、跑程式碼、操作檔案系統。後訓練階段的 RL (Post-training RL):這是個關鍵變化。LLM 訓練分兩階段,先是Pre-training (預訓練)用海量網路文本學會「下一個 token 是什麼」,再來是Post-training用 RL 把模型雕琢成能聽指令、會推理、夠安全的樣子。常見手法包含:RLHF (Reinforcement Learning from Human Feedback):人類標註員對模型多個回答排序,訓練 reward model,再用 PPO 把 LLM 往「人類偏好」推。ChatGPT 早期就是靠這套紅起來的。RLVR (Reinforcement Learning with Verifiable Rewards):reward 不靠人標,而是靠「可驗證的答案」 — 數學題對不對、程式碼能不能跑過測試。OpenAI o1/o3、DeepSeek-R1 這些「推理模型」能突飛猛進就是靠這個。DPO (Direct Preference Optimization):跳過訓練 reward model,直接從偏好資料學,實作更簡單、迭代更快。
也就是說,現在 LLM 的能力提升主軸,已經從 「pre-training 加大模型」 轉移到 「post-training 用 RL 雕琢推理與工具使用」 。這也是為什麼模型參數沒變多少,但 Agent 表現一直在跳。
同時不管是哪一個 LLM 用久了,就開始會有幻覺、記憶力短缺,所以出現了 Context Engineering,試圖要處理這些問題,出現了一堆工具,像是 OpenClaw。特別是 Cloud 版本的 LLM,幻覺問題越來越嚴重,像是 Opus 4.6 在 2026/02 開始被一堆工程師靠北一直前後文不對。
來來回回,現在的狀況大概就是:
- 有個聰明的大腦 (LLM, Ph.D),不管這顆腦是在雲上、還是在本機 / 移動端
- LLM 只要用一段時間,就開始忘東忘西,跟老年癡呆沒啥兩樣
- 大家發現「把模型包好」帶來的效益,可能比「再訓練一個更大的模型」還高
LangChain 團隊就有個經典案例:固定使用 GPT-5.2-Codex 模型不動,只調整 Harness 三個變數 (system prompt、tools、middleware hooks),就讓 deepagents-cli 在 TerminalBench 2.0 從 52.8% 提升到 66.5% (+13.7 個百分點),名次從 30 名外飆升到第 5 名。最有趣的是他們發現的失敗模式很「人性」 — Agent 寫完 code 自己 review 一下覺得 OK 就停手,所以解法是強迫 Agent 對著原始 spec 驗證,而不是 self-review。詳細參閱 LangChain Blog - Improving Deep Agents with harness engineering
Harness Engineering 就是要嘗試解決類似的問題,而比喻的概念就是像 作業系統,如下圖:
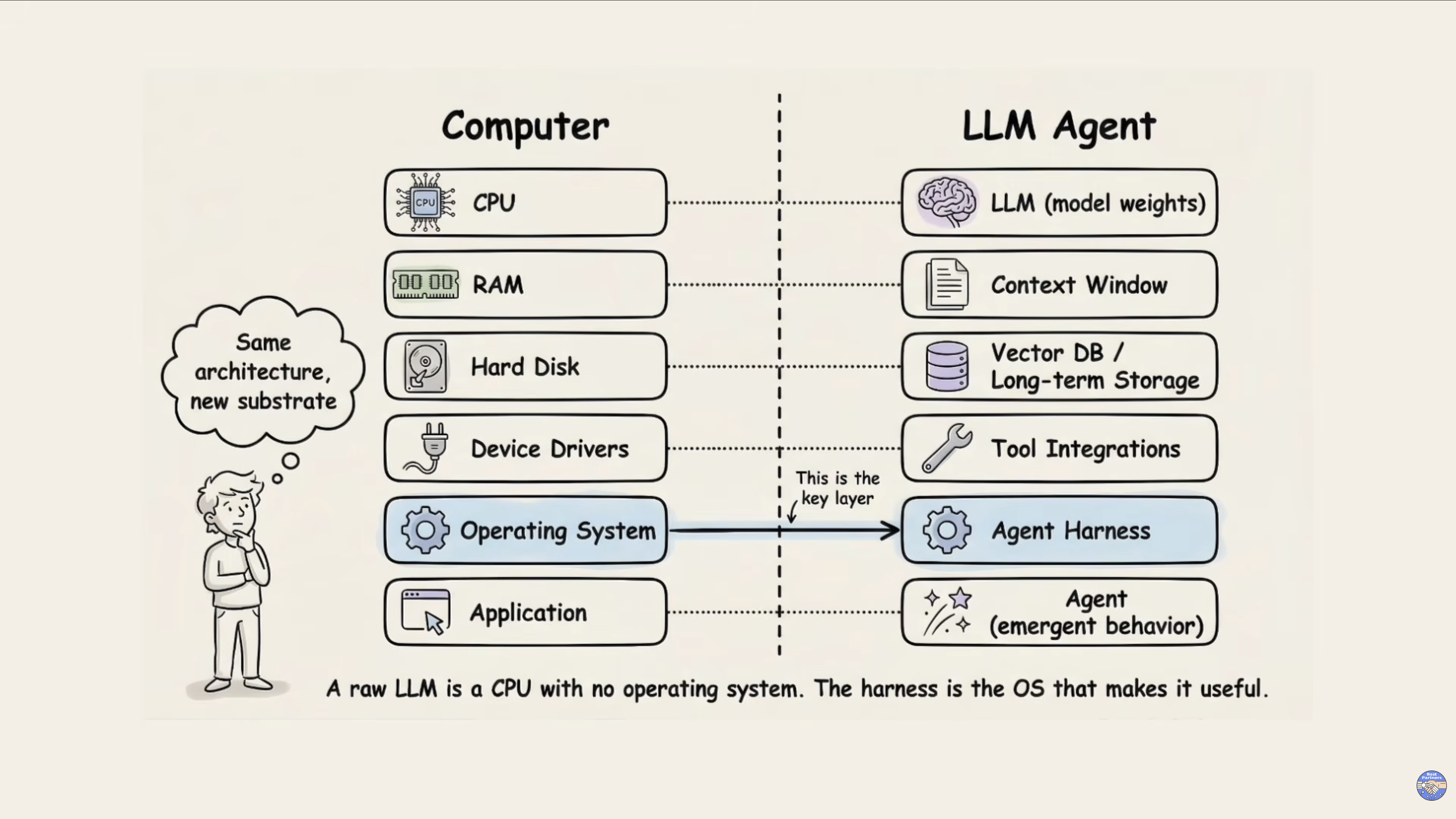
source: Agent Harness十二大模块完全解析
這個「Harness 像作業系統」的比喻其實不只是「資源調度」這麼簡單,作業系統真正的核心價值在於 抽象化與隔離:
把不可靠、無狀態、會幻覺的模型,包裝成一個對外看起來穩定可預測的系統。
回頭看我當年做的 CLI Harness 也是同樣思路:
把待測產品的不確定行為,透過 SSH/Telnet 的標準介面包起來,讓上層測試案例可以穩定執行。
本質上都是在處理「不確定性的封裝」。
我想了三個問題,來思考 Harness Engineering:
- Harness Engineering 解決的問題是什麼?
- 它如何解決?
- 現在有哪些用 Harness Engineering 實作的系統?
這三個問題,只要丟到任何一個 AI 或者利用 NotebookLM 就可以整理出很多資料了。底下是我搜集讀過的資料之後,透過 NotebookLM / Claude 討論後的整理:
1) Harness Engineering 解決的問題是什麼?
核心就一句話:讓 LLM 從「玩具級 Demo」變成「生產級應用」,也就是讓 Jarvis 成真。
要拆開來看的話,主要是三個痛點:
長時任務的「模型漂移」與累積錯誤
LLM 在單次問答、靜態排行榜上看起來很厲害,但只要任務拉長到幾百次工具調用的多步驟流程,就會在過程中慢慢走鐘。這是個簡單的數學問題 — 一個 10 步的任務,即便每步有 99% 的成功率,端到端的成功率也只剩 90.4%;如果是 100 步的任務,那只剩 36.6%。這就跟我當年做網通產品 Regression Test 一樣,單一 test case 通過不代表什麼,400+ 個全部跑過才是出貨標準。
Lost in the Middle (迷失在中間)與Context Rot (上下文腐爛)
這兩個概念相關但不完全相同,常常被混在一起:
- Lost in the Middle (迷失在中間) (Liu et al., 2023 提出的學術名稱):單次長 context 內,落在開頭和結尾的資訊模型記得很清楚,但中間位置的關鍵資訊會被忽略,推理準確率與指令遵循能力會大幅暴跌(超過 30%)。這是個架構層面的限制。
- Context Rot (上下文腐爛) :多輪對話累積之後的延伸現象 — context 塞了太多雜訊、過時資訊、矛盾指令,模型表現逐漸劣化。這比較像是「使用上的退化」。
兩個合在一起就是為什麼 Opus 4.6 在 2026/02 開始一堆人靠北前後文對不上 — 不是模型笨了,是 context 管理出問題。
玩具級 Demo與生產級應用的落差
裸奔的 LLM 就像沒有記憶體、硬碟、設備驅動的 CPU,只會輸出文字而且容易出錯。要落地到真實世界,缺的不是模型本身的能力,而是穩定性、持久運行、錯誤恢復、安全管控這些基礎設施。Harness Engineering 就是在補這塊。
2) 它如何解決?
簡單講就是 打造 AI 專屬的「作業系統」:
把模型當 CPU,Harness 自己當 OS,負責資源調度、記憶體 (上下文) 管理、設備驅動 (工具集成),提供穩定的執行環境給上層 Agent 用。
實際上有幾個關鍵機制:
編排循環與工具調用:這是核心引擎,推動 Agent 的「思考 → 行動 → 觀察」循環。標準化的 Tool Schema 讓模型能精準呼叫外部能力 (檔案、API、資料庫) 跟現實世界互動。
分層記憶系統:業界目前比較成熟的分法是三到四層,這個分法很像 OS 的記憶體階層 (cache / RAM / disk):
- Working memory — 當前對話窗口,類比 CPU cache
- Episodic memory — 這次任務的歷史與檢查點,類比 process memory
- Semantic memory — 跨會話的知識與偏好,類比持久化儲存
- Procedural memory — 學會的工作流、技能 (例如 Anthropic 的 Skills、OpenAI 的 GPTs),類比可載入的 module
搭配壓縮摘要、觀察屏蔽、動態檢索、委派子 Agent 等策略,把 context 維持在「最小但高信噪比」的狀態,避免資訊過載。
狀態保存與錯誤處理:設立檢查點 (Checkpointing) 讓長週期任務崩潰後可以斷點續跑,這個概念跟 OS 的 process snapshot / VM 的 checkpoint 完全一樣。錯誤分類 (瞬時錯誤、邏輯錯誤、不可恢復錯誤) 後分別用退避重試、回傳模型自主修復、人工介入等策略處理,避免錯誤滾雪球。
護欄與驗證回饋:三層安全紅線 (輸入、輸出、工具) 防範越權;多重驗證 (規則測試、視覺截圖比對、AI judge) 大幅提升輸出準確率。LangChain 那個案例的關鍵發現就在這裡 — 強制 Agent 對著原始 spec 驗證而不是自己 review 自己。
確定性約束 + AI 彈性:這點蠻有意思。Harness 為 AI 劃定明確的架構邊界 (硬規則),同時部署「巡檢 Agent」做垃圾回收 — 自動掃描修復系統中的不一致 (彈性處理)。這個搭配讓 Agent 既不會亂跑,又能應對沒寫死的狀況。
更進一步看,Harness Engineering 不只是「補 LLM 的弱點」,而是把軟體工程的三個傳統強項重新引入到 AI 系統:
- 可觀測性 (Observability) — 每一步工具呼叫、每一次 context 變化都可追蹤
- 可重現性 (Reproducibility) — checkpoint + 確定性約束讓任務可重跑、可除錯
- 可驗證性 (Verifiability) — 規則測試 + AI judge + 人類 review 多層把關
這也是為什麼我覺得有過 Regression Test 經驗的工程師,理解 Harness Engineering 反而比較快。銀行客戶不能容忍出錯,所以當年我們的 400+ test case 不是裝飾,是出貨保險。現在 Agent 系統如果要進企業生產環境,Harness 就是那個讓它「可以被信任」的基礎建設。
3) 現在有哪些用 Harness Engineering 實作的系統?
現在百花齊放,各種大亂鬥的年代,我整理幾個比較有能見度與代表性的:
Anthropic Claude Code (Claude Agent SDK) :通用型 Harness 的標竿代表,採用極簡的信任模型哲學。提供三級記憶層級、Git-based 的檢查點回溯機制,內建檔案操作、終端機指令、程式碼修改等生產級工具。最讓人驚艷的是 checkpoint 機制,寫到一半發現方向錯了可以直接 git revert,Agent 不會迷失。
OpenAI Agents SDK / 內部 Codex 管控框架 :採用程式碼優先設計,支援多種狀態儲存與運行模式。OpenAI 內部用同一套理念,5-7 名工程師、5 個月內、用 AI 生成與維護超過百萬行程式碼的大型應用。這個數字蠻誇張的,等於每人每月平均產出 25,000+ 行有效程式碼。
LangChain LangGraph 與 DeepAgents :把 Harness 建模為明確的狀態圖結構,支援中斷後恢復甚至「時光倒流」式除錯。前面提過他們在 TerminalBench 2.0 純靠 Harness 優化從 30 名外衝到第 5 名,這就是最直接的證據。
CrewAI 與 AutoGen (微軟):兩個走不同路線。CrewAI 主打基於角色的多 Agent 協作 — 像是組一個團隊,有 PM、有 engineer、有 reviewer,適合需要分工的場景。AutoGen 則是對話驅動的協作協議 — Agents 之間透過對話達成共識,適合開放式互動。
Manus 與 Vercel 內部系統:這兩個團隊實踐了 Harness Engineering 中很反直覺的原則 — 「為刪除而建 (Build for Deletion)」。Manus 在半年內重構五次 Harness 來移除剛性假設;Vercel 砍掉 80% 的手工工具。結果反而是 token 消耗更少、任務成功率更高。這個現象其實跟我做作業系統研究的觀察一樣 — 好的抽象往往是「拿掉了什麼」,而不是「加了什麼」。
小結
整體看下來,Harness Engineering 還在很早期的階段,現在大家在做的事情,比較像是 1970 年代各家在探索作業系統該長什麼樣子。等到這個領域成熟,可能會出現類似 POSIX 那樣的標準介面,讓不同 Harness 之間可以互通。但在那之前,每個團隊都還在用自己的方式試,這也是這個領域目前最有趣的地方。
我正在整理 自幹作業系統 的相關學習筆記時,也剛好在思考,是否要把 POSIX 標準加入 (真的只是想想而已 XD),其實也是同樣的過程。寫 OS 的人,學的是「怎麼建立穩定可靠的執行環境」這套思維。而 Harness Engineering 本質上就是把這套思維搬到 LLM 上:
scheduler -> 編排循環
memory hierarchy -> 分層記憶
process checkpoint -> 任務檢查點
syscall -> tool calling
IPC -> multi-agent 通訊
所以我 剛好 等於同時在做這兩件事?
一邊在「最底層」用手親自把這些概念刻出來,一邊在「最上層」觀察這些概念怎麼被重新發明來服務 AI。
延伸閱讀
自幹作業系統 系列
- Source Code
- Demo/錄影
- 專有名詞對照表
- 自幹作業系統 - Simple OS
- 自幹作業系統 - Networking Fundamentals
- 自幹作業系統 - 初探 Timer 原理
- 自幹作業系統 - Task and Scheduler
- 自幹作業系統 - Context Switch
站內文章
參考資料
Comments
About
著作
演講
- 演講錄影 @ Youtube
- 探索職涯、複利人生 - AWS Career Exploration Day 2023
- 個人著作 SRE 書友見面會
- 軟體測試實務 - 新書發表會
- 探索職涯、成就未來 - AWS Career Exploration Day 2022
- 從理想、到現實的距離,開啟品味軟體測試之路
- 91APP 在 AWS 上的 SRE 實踐之路
- 在矩陣型組織裡,如何有效管理 AWS 的成本結構與系統架構
- 災難演練 @ AWS 實戰分享
- 導讀持續交付 2.0 - 談當代軟體交付之虛實融合
- 聊聊軟體交付的濫觴 談產出物管理
- 從緊急事件 談 SRE 應變能力的培養
- 邁向 API 經濟 - API Gateway 導入之旅
- Monitoring Tools 大亂鬥 - AWS CloudWatch
- Ops as Code using Serverless
- 淺談系統監控與 CloudWatch 的應用
AWS Certifications


